1. Một vật dao động điều hoà có biên độ 10cm, tần số 5Hz. Tại thời điểm ban đầu \(\left( {t = 0} \right)\) vật ở vị trí biên.
- Xác định chu kì, tần số góc, pha ban đầu của dao động.
- Viết phương trình và vẽ đồ thị \(\left( {x - t} \right)\) của dao động.
2. Cho hai con lắc đơn dao động điều hoà. Biết phương trình dao động của con lắc thứ nhất là \(x = 20\cos \left( {20\pi t + \frac{\pi }{2}} \right)(cm)\). Con lắc thứ hai có cùng biên độ và tần số nhưng lệch về thời gian so với con lắc thứ nhất một phần tư chu kì. Viết phương trình dao động của con lắc thứ hai.

1. Áp dụng các công thức đã học để tính tần số góc, pha ban đầu, từ đó viết phương trình dao động điều hoà, vẽ đồ thị hàm sin (cos) với các đại lượng tính được.
2. Tính biên độ và tần số góc của con lắc thứ 2.
Tính chu kì của hai con lắc.
Hai con lắc lệch về thời gian so với con lắc thứ nhất một phần tư chu kì có thể suy ra: \({t_2} = {t_1} + \frac{T}{4}\) hoặc \({t_2} = {t_1} - \frac{T}{4}\). Thay \({t_2}\) vào phương trình ta viết được biểu thức dao động của hai con lắc.

1. Chu kì dao động là: \(T = \frac{1}{f} = \frac{1}{5} = 0,2\left( s \right)\)
Advertisements (Quảng cáo)
Tần số góc của dao động là: \(\omega = 2\pi f = 2\pi .5 = 10\pi \) (rad/s).
Lúc \(t = 0:\left\{ \begin{array}{l}x = A\\v = 0\end{array} \right. \Rightarrow \left\{ \begin{array}{l}\cos \varphi = 1\\\sin \varphi = 0\end{array} \right. \Rightarrow \varphi = 0.\)
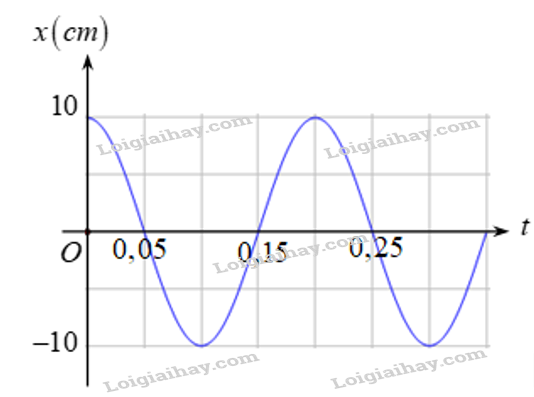
Phương trình dao động là: \(x = 10\cos \left( {10\pi t} \right)\) cm.
Vẽ đồ thị:
2. Con lắc thứ hai có biên độ và tần số góc là: \(\left\{ \begin{array}{l}{A_2} = {A_1} = 20\left( {cm} \right)\\{\omega _2} = {\omega _1} = 20\pi \end{array} \right.\)
Chu kì của hai con lắc là: \(T = \frac{{2\pi }}{\omega } = \frac{{2\pi }}{{20\pi }} = 0,1\left( s \right)\)
Hai con lắc lệch về thời gian so với con lắc thứ nhất một phần tư chu kì nên ta có:
\(\left[ \begin{array}{l}{t_2} = t + \frac{T}{4} = t + \frac{{0,1}}{4}\\{t_2} = t - \frac{T}{4} = t - \frac{{0,1}}{4}\end{array} \right. \Rightarrow \left[ \begin{array}{l}{x_2} = 20\cos \left[ {20\pi \left( {t + \frac{{0,1}}{4}} \right) + \frac{\pi }{2}} \right]\\{x_2} = 20\cos \left[ {20\pi \left( {t - \frac{{0,1}}{4}} \right) + \frac{\pi }{2}} \right]\end{array} \right.\)
\( \Rightarrow \left[ \begin{array}{l}{x_2} = 20\cos \left( {20\pi t + \pi } \right)\\x = 20\cos \left( {20\pi t} \right)\end{array} \right.\)