1. Trong không gian cho ba trục tọa độ chung gốc \(O\), đôi một vuông góc với nhau \(x’Ox ; y’Oy ; z’Oz\). Hệ ba trục tọa độ như vậy được gọi là hệ trục tọa độ Đề-các vuông góc \(Oxyz\); \(O\) là gốc tọa tọa độ. Giả sử \(\overrightarrow{i},\overrightarrow{j},\overrightarrow{k}\) lần lượt là các vectơ đơn vị trên các trục \(x’Ox, y’Oy, z’Oz\) (h. 52)
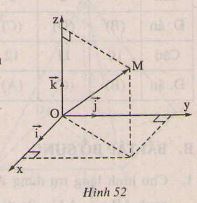
Với điểm \(M\) thuộc không gian \(Oxyz\) thì tồn tại duy nhất bộ số \((x ; y ; z)\) để
\(\overrightarrow{OM}= x.\overrightarrow{i}+y.\overrightarrow{j}+z.\overrightarrow{k}\),
bộ \((x ; y ; z)\) được gọi là tọa độ của điểm \(M(x ; y ; z)\).
Trong không gian Oxyz cho vectơ \(\overrightarrow{a}\), khi đó \(\overrightarrow{a}= a_{1}\overrightarrow{i}+a_{2}\overrightarrow{j}+a_{3}\overrightarrow{k}\)
Ta viết \(\overrightarrow{a}\)(a1 ; a2 ; a3) và nói \(\overrightarrow{a}\) có các tọa độ (a1 ; a2 ; a3) .
2. Biểu thức tọa độ của các phép toán vectơ
Giả sử \(\overrightarrow{a}\)= (a1 ; a2 ; a3) và \(\overrightarrow{b}\) = (b1 ; b2 ; b3), thì:
\(\overrightarrow{a}\) + \(\overrightarrow{b}\) = (a1 + b1 ; a2 + b2 ; a3 + b3 ).
Advertisements (Quảng cáo)
\(\overrightarrow{a}\) - \(\overrightarrow{b}\) = (a1 - b1 ; a2 - b2 ; a3 - b3 ).
k.\(\overrightarrow{a}\) = (ka1 ; k a2 ; ka3).
3. Tích vô hướng.
Cho \(\overrightarrow{a}\)(a1 ; a2 ; a3) và \(\overrightarrow{b}\)(b1 ; b2 ; b3) thì tích vô hướng
\(\overrightarrow{a}\).\(\overrightarrow{b}\) = a1.b1 + a2.b2 + a3.b3.
Ta có: \(|\overrightarrow{a}|=\sqrt{a_{1}^{2}+a_{2}^{2}+a_{3}^{2}}.\)
Đặt \(\varphi =\left (\widehat{\overrightarrow{a},\overrightarrow{b}} \right )\) , 0 ≤ \(\varphi\) ≤ 1800 thì \(cos\varphi =\frac{a_{1}b_{1}+a_{2}b_{2}+a_{3}b_{3} }{\sqrt{a_{1}^{2}+a_{2}^{2}+a_{3}^{2}}\sqrt{b_{1}^{2}+b_{2}^{2}+b_{3}^{2}}}\) (với \(\overrightarrow{a}\) ≠ \(\overrightarrow{0}\), \(\overrightarrow{b}\)≠ \(\overrightarrow{0}\))
4. Phương trình mặt cầu.
Trong không gian \(Oxyz\), mặt cầu \((S) \) tâm \(I(a ; b ; c)\) bán kính \(r\) có phương trình:
(x - a)2 + (y – b)2 + (z – c)2 = r2.